Research
触覚を起点に「ヒトとは何なのか」を本質的に理解し利用することでヒトを助ける技術を構築することを目標としています. そのために,ロボットやバーチャルリアリティの知見・技術に基づき,ヒト・機械・AIが共存する社会に必要となる理論・技術の創出を目指します.
Robotics
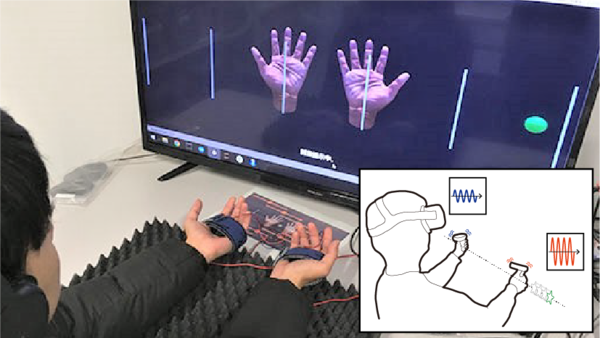
触覚・力覚ハイブリッド伝送:アバターロボットを介した材質感の遠隔伝送
アバターロボットを介して素材をなぞる際に発生する力覚情報および振動触覚情報を伝送することで素材の材質感を操縦者に伝送するシステムを構築した.
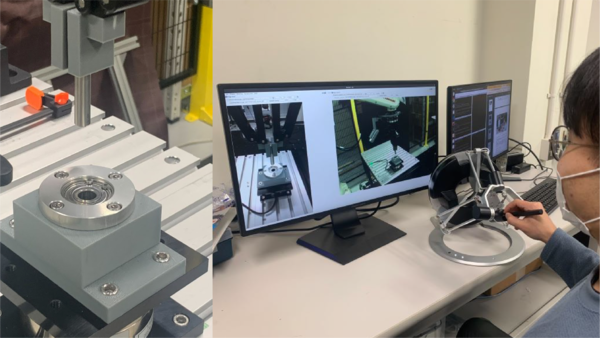
触覚伝送を活用した遠隔作業支援:産業用ロボットによる遠隔組立作業
接触を伴う産業用ロボットによる組立作業に遠隔から介入する際の操縦支援システムを構築した.力覚情報の伝送によって作業性が向上した.
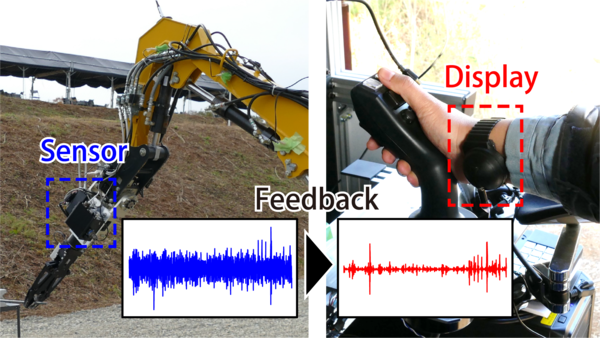
振動触覚情報の強調伝送:ロボットの遠隔操縦支援への適用
振動触覚情報をヒトが知覚しやすい情報に変換し提示するシステムを構築した.建設機械の遠隔操縦支援に適用した結果,作業性の向上を確認した.
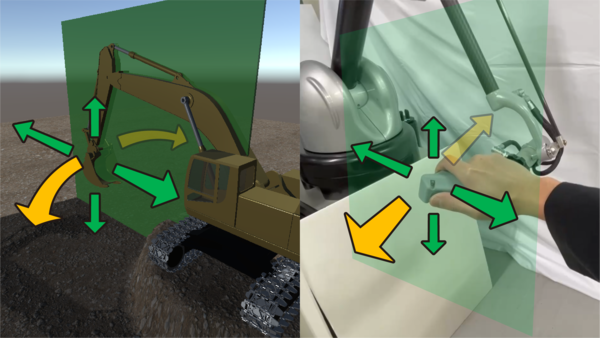
ハイブリッド操縦インタフェース:サブタスクごとに適した操縦方法の統合
掘削,旋回などの複数のサブタスクごとに適した操縦方法を実験的に調査し,その結果を統合することで高い操作性と低い操作負担を実現する操縦インタフェースを構築した.
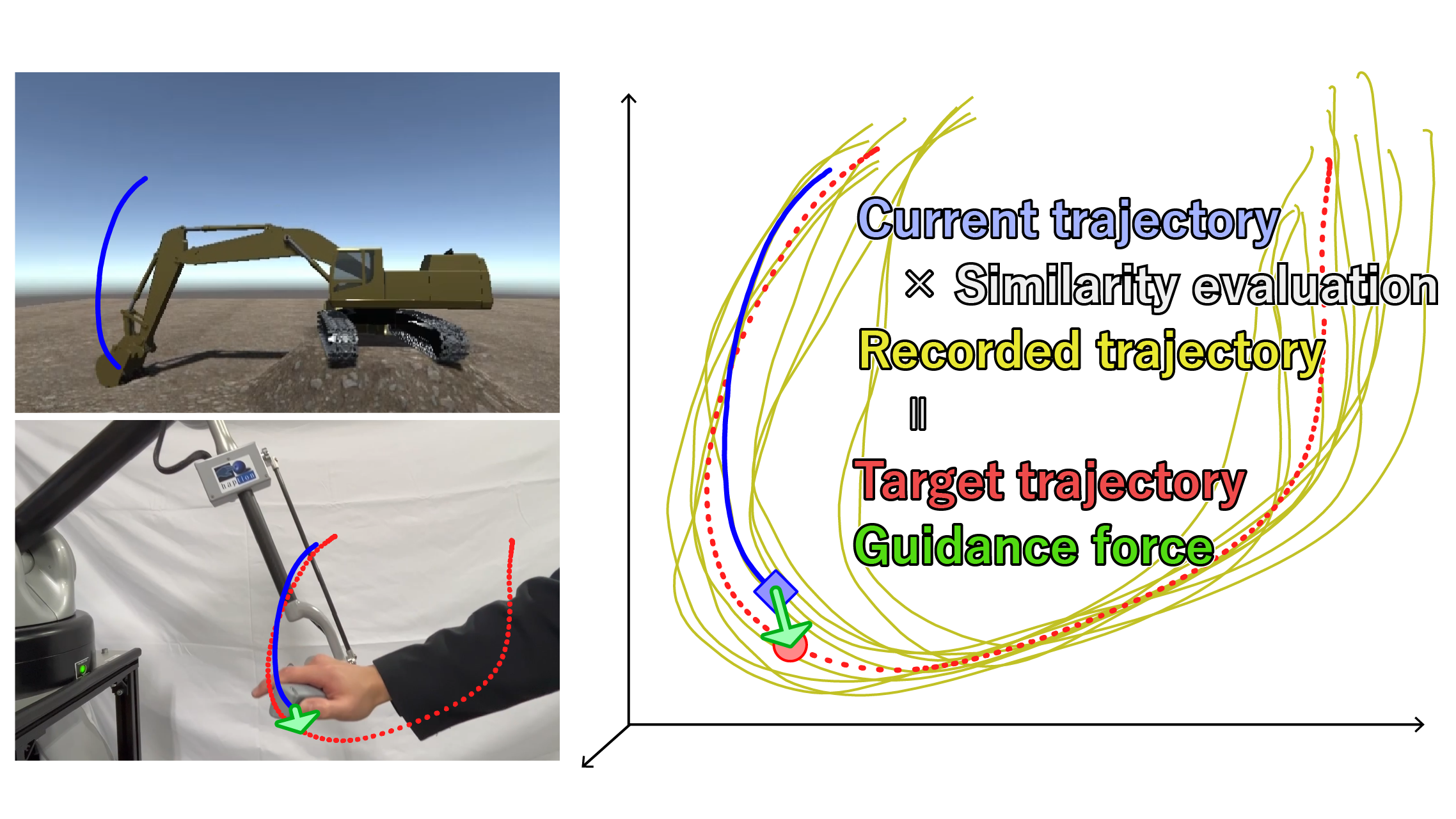
機械学習+力覚提示:軌道類似性を利用した建設機械の遠隔操縦支援
操縦軌道の事前学習とリアルタイムでの軌道類似性評価に基づき目標軌道を算出し,軌道に追従する力覚提示を行うことで,操縦者の身体的・精神的負担を軽減する操縦支援システムを構築した.
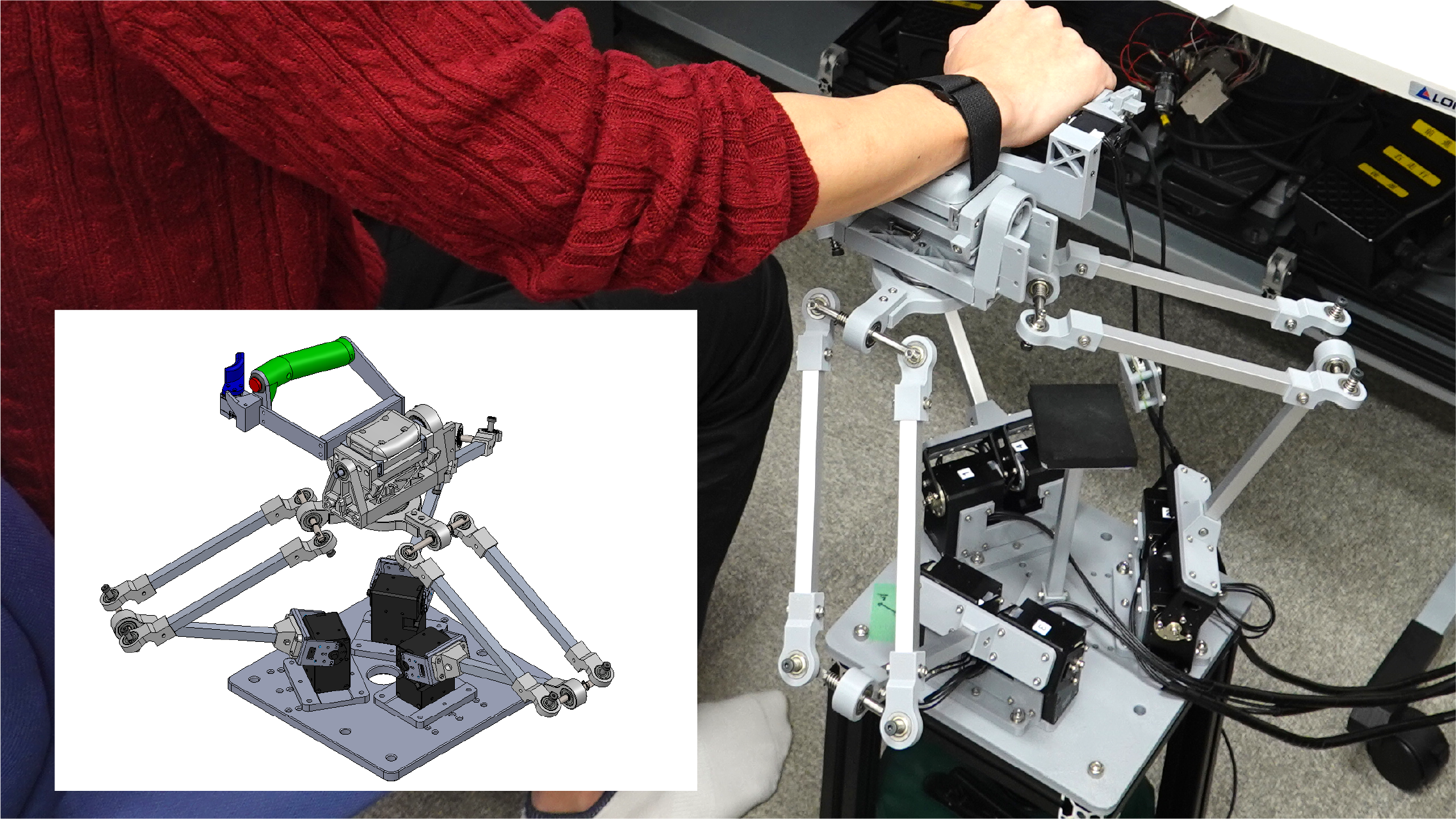
次世代操縦インタフェース機構:建設機械の操作性向上に向けた機構の検討
直感的な操作入力が可能であるとともに身体的・精神的な負担が低い操作インタフェースの機構を実験的に比較した.
Virtual Reality

圧力分布再現型遠隔握手システム:握手に伴う相互作用的な圧力分布の動的再現
遠隔コミュニケーションの支援のため,握手に伴って相互作用的に発生する掌の圧力分布をモデル化し,触覚ディスプレイを介して再現するシステムを構築した.
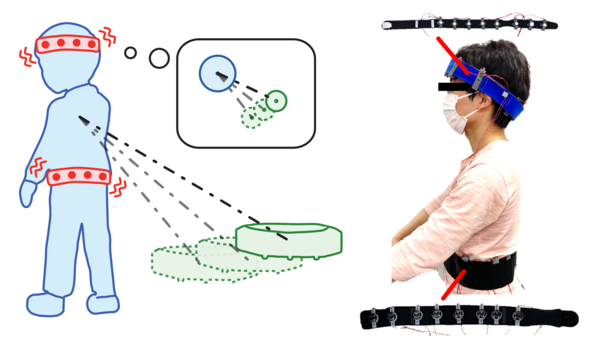
複数の振動刺激による3次元位置情報提示
周囲の物体の3次元位置情報を振動刺激を用いてヒトに知覚させるシステムを構築した.また,複数の振動刺激を目標位置に応じて動的に制御するモデルを構築した.
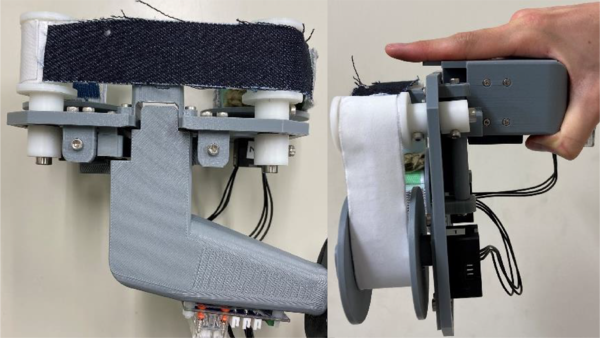
VR内での多様な素材感提示に向けた素材巻取型ディスプレイ
多種の素材の巻き取り・送り出しをVRに連動して動的に制御することで,VR内で様々な素材に触れる感覚を提示するシステムを構築した.
ファントムセンセーションの拡張:振動刺激による広範囲での物体移動感提示
ファントムセンセーションと呼ばれる触覚の錯覚現象を拡張し,ユーザの周囲を物体が移動する感覚を提示するアルゴリズムを構築した.
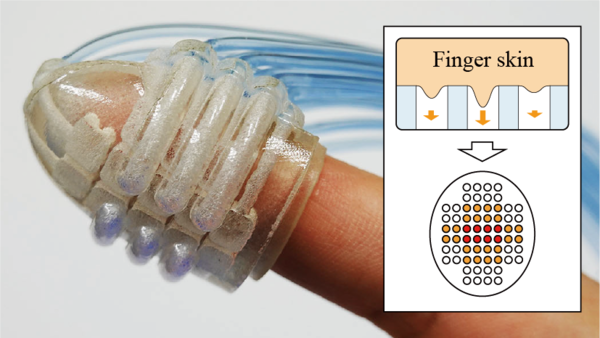
皮膚吸引圧力の時空間分布制御に基づく指先装着型触覚ディスプレイ
吸引口からの吸引圧力を時空間的に制御することで,指先皮膚に分布的な情報を提示する装着型触覚ディスプレイを構築した.

パラレルリンク機構を用いた6自由度指先皮膚変形ディスプレイ
パラレルリンク機構を用いて指先接触面の6自由度位置・姿勢を制御する触覚ディスプレイを構築した.多様な物体形状や指先に加わる力・トルクの再現が可能となる.
Human Perception
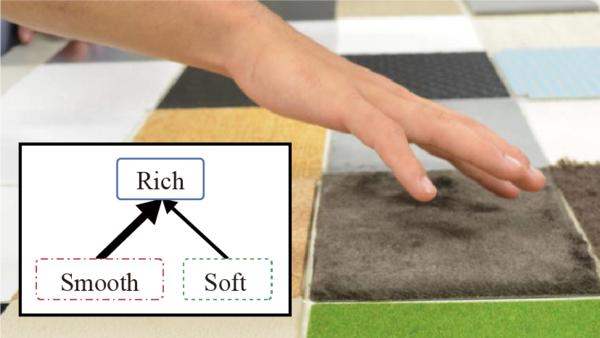
触感性の多様性を表現する多次元多階層モデル
ヒトが知覚する触感は多様であり,ときに個人差を含む.そのような多様性を表現する多次元で多階層な数理モデルを構築した.
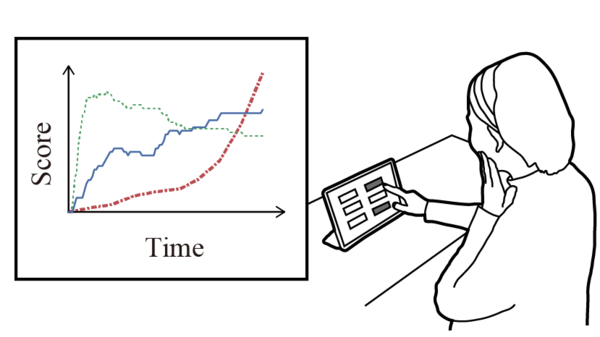
触感の時系列モデル:経時変化に含まれる個人差の分析
触感は対象に触れることで知覚されるため,経時的な変化を含む感覚である.そのような時系列性を陽に捉え工学的に利用可能とするためのモデルを構築した.
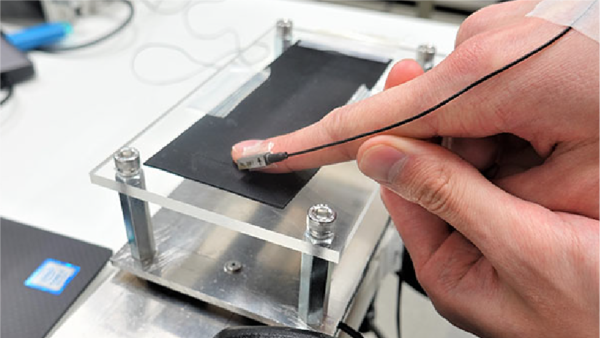
皮膚状態の多種同時計測に基づく触感性評価
触感性に寄与する皮膚振動,皮膚変形,接触力などの様々な要素の同時計測を実施した.