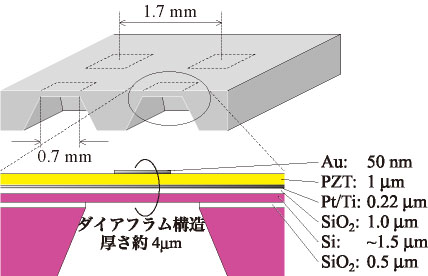
現在作製しているセンサの構造は例えば上の図のようになっています。 シリコンのバルクマイクロマシニングという技術を使って、 基板のシリコンを削り(エッチング)、 非常に薄い構造(ダイアフラム)を作ります。 このダイアフラムはとても薄いので、超音波が当たると撓み振動します。 ダイアフラムには圧電層が設けてあり、この波打つ振動を電気信号に変換します。
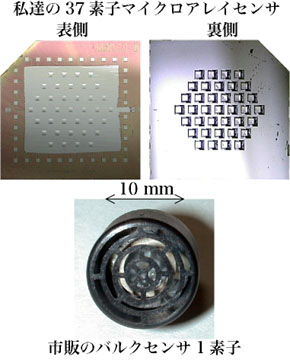
出来上がったアレイセンサ(一例)の写真はこのようになっています。 六角形のリング状に配置されている小さな正方形一つ一つが、 センサのダイアフラムです。 おもて側には、各センサ素子から引っ張り出した配線と電極が見えます。 裏側には、シリコンをエッチングした穴が見えます。 図の下側には市販のバルクセラミックスのセンサ (日本橋とかで買えるもの)を同じ縮尺で載せています。 市販のセンサはこのサイズで1素子ですが、 私達のセンサは同じサイズに37個の素子を配置しています。
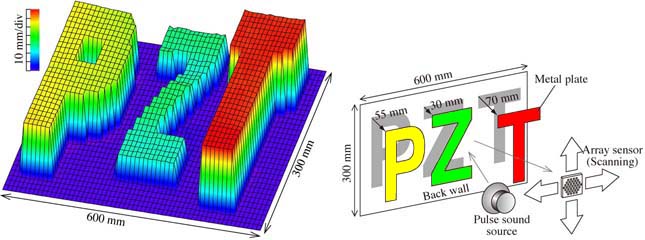
リング上のアレイセンサを接続して、センサの正面方向だけに感度を持つようにし、 センサを機械的に走査することにより、非接触で物体の形を測定することができます。 図は、対象物として文字の形に切り抜いた金属の板を使っています。 後ろの壁から、それぞれ異なる距離だけ離して P, Z, T の三枚の板を固定しました。 これに向かい合わせて、 パルス超音波を発射しながら移動するセンサの各点で距離を測定します。 すると、対象物までの距離の分布が測定でき、 三次元形状が図のように浮かび上がります。
実は、このようにセンサを動かさないでも、 電気的に処理することにより「センサを動かしたのと同じ効果」 を得ることができます。 これを「電子走査」といいます。 現在、この電子走査によって三次元計測するシステムを作製しています。 また並行して、電子走査のための信号処理回路の作製も行なっています。